Descripción
En la plataforma y el talud continental se localizan ecosistemas bentónicos, muchos de ellos explotados de forma sistemática como recursos pesqueros y, por tanto, gravemente dañados por los métodos de pesca utilizados en el último siglo. El rápido deterioro en el estado de muchas pesquerías urge el desarrollo de modelos de gestión sostenible, los cuales demandan conocimiento científico sólido que tenga en cuenta la interacción de todos los componentes de los ecosistemas marinos entre sí y con las condiciones ambientales. Para mejorar este conocimiento es imprescindible disponer de medios que permitan hacer una monitorización continuada en el tiempo.
El proyecto LanderPick tiene como objetivo el diseño de un sistema de largado y recogida de landers oceanográficos –sistemas modulares que descansan en el fondo operando de forma autónoma por tiempo definido y están dotados de diversos sistemas de sensores (plataforma multiparamétrica)-, trasportándolos como carga en un vehículo remolcado de operación remota (ROTV; Remotely Operated Towed Vehicle) para la monitorización continuada que permita entender su evolución en diferentes escalas de tiempo, de acuerdo a la evolución de las propias variables ambientales.
De esta forma resulta factible concebir sistemas de monitorización basados en el despliegue simultáneo de varios landers ligeros y de bajo coste. El proyecto busca operar landers relativamente pequeños y económicos, que no incorporen sistemas activos de recuperación basados en liberadores acústicos, a gran profundidad. Si el sistema tiene éxito entonces resulta factible, por un lado, concebir sistemas de monitorización basados en el despliegue simultáneo de varios landers con un coste contenido y, por otro, experimentos asociados a hábitats profundos como arrecifes de coral en los que sea necesario ubicar landers con gran precisión.
General:
Diseñar, construir y probar un vehículo de operación remota para el largado y recogida de pequeños observatorios multiparámetricos submarinos (landers) dotados de malla de captura.
Específicos:
1. Diseño y fabricación del LanderPick.
2. Diseño y fabricación de pequeños landers y gancho.
3. Pruebas de mar del funcionamiento del sistema.
A1 «Diseño y fabricación de LanderPick. Esta actividad consiste en diseñar y fabricar el vehículo LanderPick para largado y recogida de observatorios multiparamétricos submarinos (landers).
A2 «Fabricación de Landers y gancho de recogida Fabricación de 2 landers adecuados al LanderPick en paralelo a la fabricación del LanderPick.»
A3 «Campaña de pruebas del sistema en el mar. Campaña de pruebas de largado y recogida del sistema, partiendo de cotas inferiores a los 40 metros, accesibles al buceo, para aumentar progresivamente hasta gran profundidad.»
A4 «Despliegue de un grupo de landers instrumentados en un área marina protegida. DESCARTADO TRAS EL RECORTE DE PRESUPUESTO Consistirá en el largado de cuatro landers, ya en vistas a obtener observaciones de interés científico, bien en la zona de El Cachucho bien en el sistema de cañones de Avilés.»
A5 «Informes y Divulgación Redacción de informes y actividades de divulgación según los resultados que se vayan obteniendo.»
El proyecto LanderPick ha supuesto la puesta en práctica del diseño de un vehículo submarino para el largado y la recogida de landers oceanográficos, de pequeño porte y que no dispongan de elementos propios de recuperación, pero sí una estructura que facilite su enganche (malla de captura). Se ha podido demostrar así que es posible largar y recuperar landers ligeros con precisión y de una forma ágil y económica. El vehículo LanderPick es técnicamente un ROTV (vehículo remolcado de operación remota) basado en los principios de posicionamiento y navegación del ROTV Politolana desarrollado en el IEO.
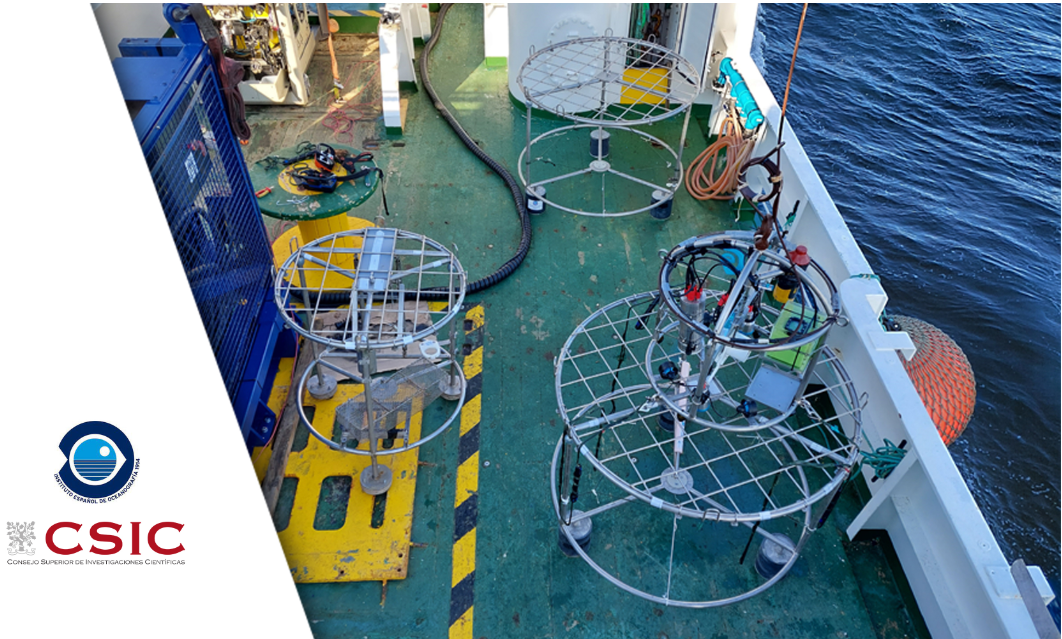
Primeramente, se desarrolló el diseño y construcción de un primer prototipo de vehículo LanderPick, para construir después dos landers para distintos tipos de fondo, uno cónico, adecuado a ubicaciones donde se realiza pesca de arrastre, y otro cilíndrico, para zonas libres de estas artes de pesca. Estas acciones incluyeron la elaboración de un manual de uso del landerpick. Asimismo, se realizaron pruebas del sistema a bordo de buque oceanográfico (campaña PhotoMare y Ecomarg2021. Esta última campaña permitió un uso satisfactorio del sistema en condiciones reales en áreas marinas protegidas).
En la última fase del proyecto se reforzó la labor de divulgación, incluyendo la edición de un vídeo demostrativo y la participación en un congreso internacional de tecnología MarTech.
La viabilidad del sistema ha quedado demostrada, abriendo expectativas muy interesantes en el marco de la continuación del proyecto con LanderPick2 y la colaboración con la ACCIÓN C.2 del Proyecto LIFE Intemares: «Proyectos piloto de monitorización de especies y hábitats marinos mediante el uso de nuevas tecnologías».

LANDERPICK – Desarrollo de un sistema remoto de largado y recogida de observatorios multiparamétricos submarinos











 volver al buscador
volver al buscador